

刘细凤
安科瑞电气股份有限公司 上海嘉定201801
摘要:电动汽车用户年龄段参差不齐,对于充电操作流程的阅读和理解存在困难;支付平台的不兼容也给用户带来了不便。针对存在的问题,结合常规充电桩的特点,兼顾无人驾驶车辆的充电问题,设计并开发了一套集成自动充电和手动充电于一体的新式充电设备,既能兼容现有的充电方式,又能针对无人驾驶车辆实现自动充电口对接、充电、扣费等操作,提高了充电智能化。实验结果表明,该系统运行稳定,能够解决充电操作不统一和付费平台不兼容等问题。
关键词:充电桩;无人驾驶车辆;自动对接;智能充电
引言
新能源电动汽车产销与充电桩/站建造数量与日俱增,但在迅猛发展的同时也存在问题,比如:找充电桩难、付费方式不兼容、操作步骤不统一等。所以目前亟待研究出一种无人参与的新式充电设备,来解决市面上充电桩存在的问题。
另一方面,车辆无人驾驶技术发展日趋成熟,包括美国、日本、德国、中国等在内的国家和地区都在进一步加快无人驾驶领域的布局[1-2]。文献[3]开展了无人驾驶车辆智能水平评价研究。文献[4,5]介绍了无人驾驶主要技术手段和发展现状。可以看出,无论是从解决实际问题出发还是从技术储备角度出发,研究针对无人驾驶车辆的充电技术都是很有必要的。
目前也有国内外部分学者针对电动汽车充电问题进行了相关研究。文献[6]介绍了电动汽车充电相关的仪表校验技术,文献[7]开展了无人值守的智能充电桩的研究。文献[8,9]探讨了制约充电设施发展的主要原因以及产业建设研究。文献[10]设计了智能充电桩嵌入式控制系统。但是目前关于充电桩的研究都只针对普通电动汽车,尚不能满足自动驾驶的电动车辆充电问题。
本论文立足技术创新,提出一种新式充电桩,该充电桩集成手动充电和自动充电于一体,手动充电兼容现有的电动汽车充电方式,自动充电方式则为无人车的充电问题提供解决方案。
一、系统整体设计
充电服务系统包含了运营管理平台、云端、用户APP、充电桩、电动车辆,如图1所示。
常规的电动汽车,车主驾驶车辆进入充电区域后,可以自行插拔充电枪,并刷卡认证从而进行充电;而无人驾驶车辆则先进行车辆自动识别,然后通过自动对接技术来完成充电枪与充电口的识别与插接工作,从而进行充电操作。
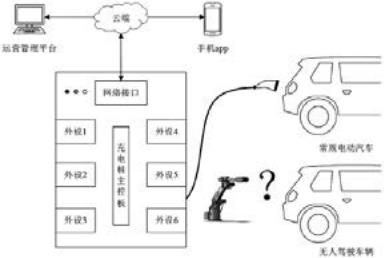
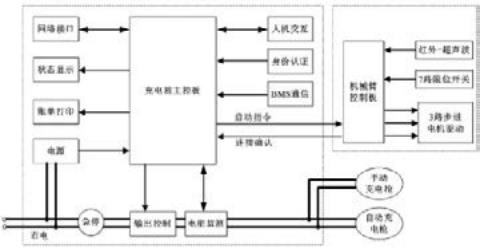
图2无人充电桩硬件结构图
二、安科瑞充电桩运营管理平台
1、系统架构
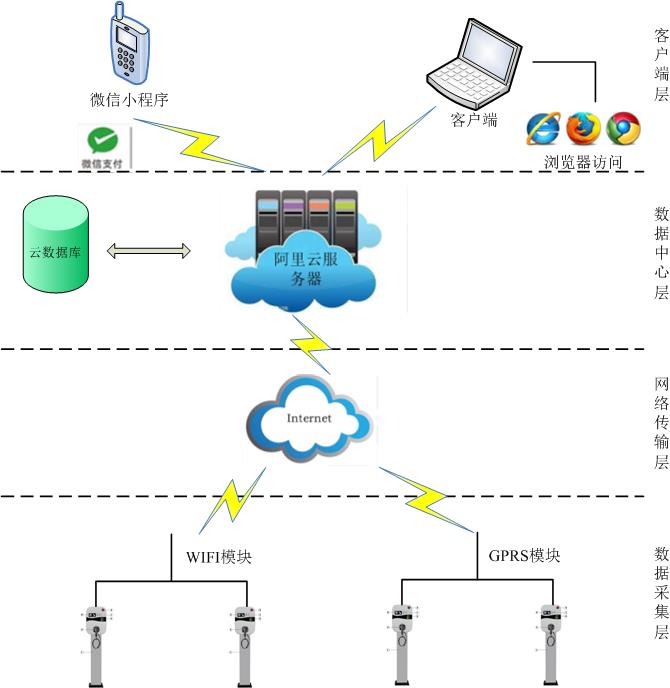
安科瑞Acrelcloud-充电桩收费运营云平台系统通过物联网技术对接入系统的充电桩站点和各个充电桩进行不间断地数据采集和监控,同时对各类故障如充电机过温保护、充电机输入输出过压、欠压、绝缘检测故障等一系列故障进行预警;用户通过微信小程序扫描二维码,进行支付后,系统发起充电请求,控制二维码对应的充电桩完成电动汽车的充电过程。
充电桩可选配WIFI模块或GPRS模块接入互联网,配合加密技术和秘钥分发技术,基于TCP/IP的数据交互协议,与云端进行直连。云平台包含了充电收费和充电桩运营的所有功能,具体功能如下:
资源管理:充电站档案管理,充电桩档案管理,用户档案管理,充电桩运行监测,充电桩异常交易监测。
交易结算:充电价格策略管理,预收费管理,账单管理,营收和财务相关报表
用户管理:用户注册,用户登录,用户帐户管理,消息管理
充电服务:充电设施搜索,充电设施查看,地图寻址,在线自助支付充电,充电结算,导航等
微信小程序:扫码充电,账单支付等功能
数据服务:数据采集,短信提醒,数据存储和解析
变压器监控:监控充电站变压器负荷,每个充电站配备一块ARCM300T无线表,超负荷时系统自动对充电桩的进行调度管理,即当负荷超过百分之五十时,系统会限制新增开始充电的充电桩的功率,降为百分之五十,当变压器负荷超过百分之八十时,系统将不允许新增充电桩开始充电,直到负荷下降为止。
2.1平台登录
在浏览器打开云平台链接、输入账户名和权限密码,进行登录,防止未授权人员浏览有关信息。

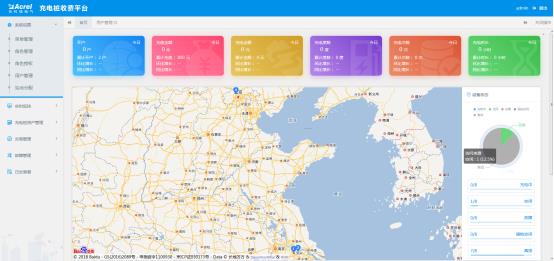
平台首页总览每天的开户数、充值金额、充电金额、充电度数、充电次数、充电时长,累计的开户数、充值金额、充电金额、充电度数、充电次数、充电时长,以及相应的环比增长和同比增长以及桩、站分布地图导航、本月充电统计。
2.3实时监控
充电站监控页面监视用户充电枪总数、正在充电的枪数、空闲枪数、插枪数量、故障枪数量等,汇总了用户拥有各桩的当日充电总次数、总电量、总时长,进行负荷限制、故障查询。

充电桩监控页面充电枪的基本信息、今日充电电量、今日充电次数、今日充电时长和累计充电电量、累计充电次数、累计充电时长等、充电电压电流等参数。

l 搜索与使用
微信小程序可以通过扫描二维码和微信文字搜索找到,点击后可以加入到小程序列表,如下图所示


l 授权登录界面
用户通过搜索或者扫码等途径初次打开小程序时,会进入这个页面,需要用户授权登录才可以进入小程序主功能页面,如图所示:


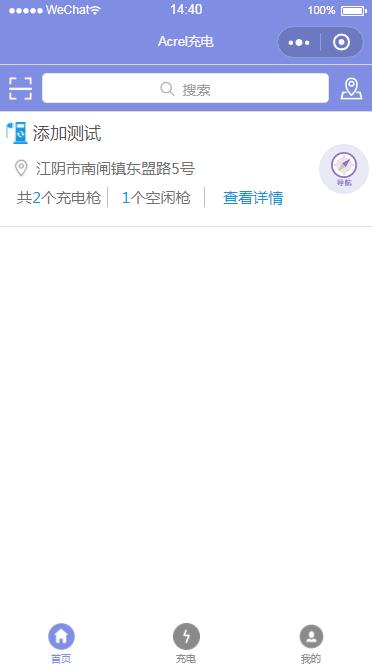
l 主功能页
初次进入主功能页时需要授权定位才可以使用地图相关功能,在地图上查看到当前所在区域的充电站,查看充电站信息,可以进行扫码充电操作,地图导航等。


l 充电
扫描充电枪上的二维码,如果当前充电桩可用即可进入充电选择页面,可以查看到当前的充电站名称、充电枪名称,以及当前的账户余额,电价和预计可充电量等数据,还可以查看当前账户的历史充电记录。充电方式分为按时间充电、按金额充电、按电量充电这三种方式。充电结束可以进进行评价。



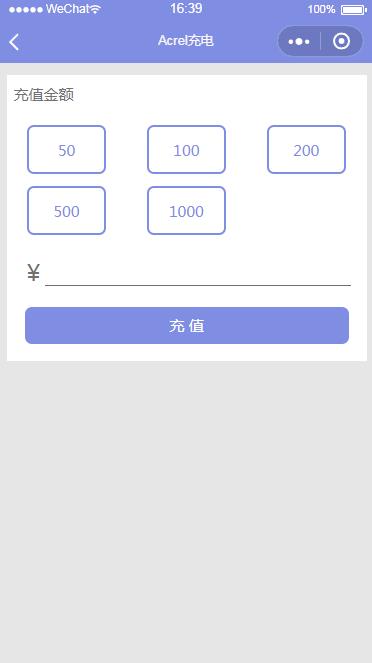
l 个人信息
个人信息可以显示当前登录账号的昵称和余额,同时包括、充值、充值记录查询、账单查询、充电记录查询、设置支付密码等功能


3.1平台服务器:建议按照我方推荐配置购买,或者客户自己租用阿里云资源。
推荐硬件配置清单:(如申请阿里云可忽略)
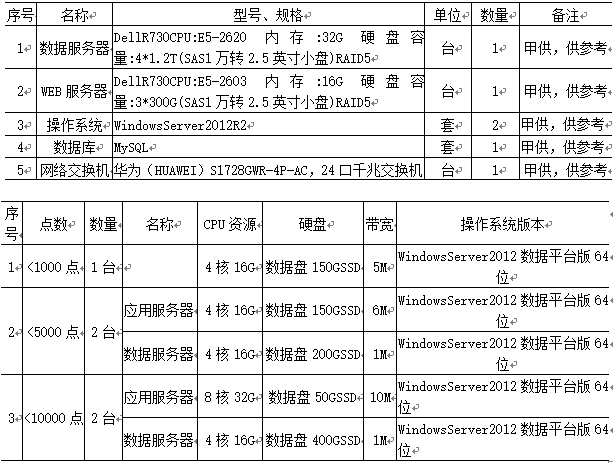
若客户自己租用阿里云服务器,服务器配置根据充电枪点数的不同,分别如下:
3.2现场推荐硬件配置清单:

三、安科瑞限流式保护器的介绍与选型
1、限流式保护器的设计
电气防火限流式保护器可有效克服传统断路器、空气开关和监控设备存在的短路电流大、切断短路电流时间长、短路时产生的电弧火花大,以及使用寿命短等当弊端,发生短路故障时,能以微秒级速度快速限制短路电流以实现灭弧保护,从而能显著减少电气火灾事故,保障使用场所人员和财产的安全。
安科瑞ASCP200-1电气防火限流式保护器的主要元件是固态开关,不同于传统家用的空气开关(微断)。我们知道,传统空气开关的断开是一种机械运动过程,分断时间需要几十毫秒(一般30~50ms),带负载断开时通常伴随有电弧的产生。而固态开关的断开则是依靠半导体内部的载流子运动实现,分断时间微秒级,速度快,无电弧产生。
如图1所示,当发生短路故障时,传统空气开关在电流升至C点时才能动作,且无法瞬时切断电流,而固态开关则可以在电流升至B点时即瞬间切断短路电流。
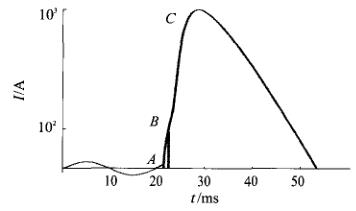
从流过电阻的电流热量公式Q=I2Rt,可以很容易看出,传统空气开关与固态开关在短路时所释放的能量差别可以达到数千倍之多。因此当装配限流式保护器的回路发生短路故障时,就可以避免电弧的产生,从而有效降低了电气火灾。
2、ASCP200-1功能特点

ASCP200-1型电气防火限流式保护器是单相限流式保护器,较大额定电流为63A。主要功能如下:
A)短路保护功能,线路发生短路故障时,能在150微秒内实现快速限流保护;
B)过载保护功能,线路持续过载时,保护器限流保护;
C)表内超温保护功能,保护器内部器件工作温度过高时,保护器限流保护;
D)过/欠压保护功能,线路欠压或过压时,保护器告警或限流保护(可设);
E)电缆温度监测功能,被测线缆温度超过报警设定值时,保护器告警或限流保护(可设);
F)漏电流监测功能,线路漏电超过报警设定值时,保护器告警或限流保护(可设);
G)通讯功能,保护器配置1路RS485接口,1路2G无线通讯,可以将数据发送到安科瑞Acrel-6000安全云平台,或第三方监控软件或平台,从而实现远程监控。
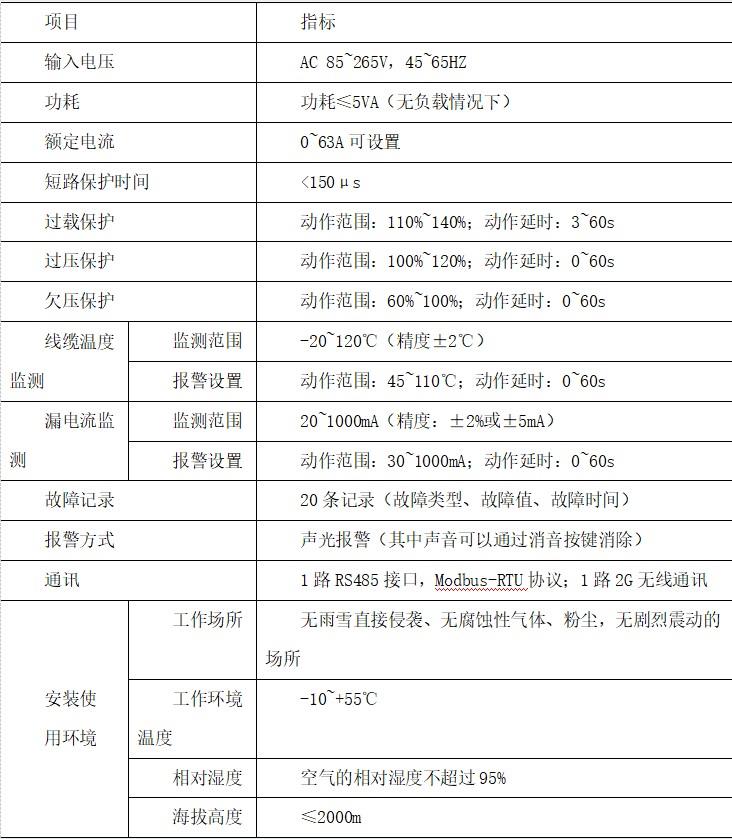
3、ASCP200-1技术参数
4、应用方案图示
ASCP200-1型电气防火限流式保护器建议安装在入户开关下端,额定电流值根据入户开关的具体规格进行设置,典型应用示意图如图2所示:

图2ASCP200-1家用防火解决方案安装示意图
5、使用注意事项
在选用限流式保护器时,限流式保护器的设定的额定电流应该与其前上级的断路器的额定电流保持一致。例如,当限流式保护器输入端断路器的额定电流为32A时,应将限流式保护器的额定电流设置为32A。为保障限流式保护器的正常使用,严禁将其使用于与其前端断路器的额定电流不匹配的配电线路中。
ASCP200系列采用限流式保护器采用壁挂式安装,可以挂墙安装,也可以安装在箱体内,应确保安装场所无滴水、腐蚀性化学气体和沉淀物质,并注意环境温度和通风散热。
为确保可靠连接,接线时应按接线图进行,同时为了防止接头处接触电阻过大而导致局部过热,也避免因接触不良而导致保护器工作不正常,线头应采用合适大小的U形冷压头压接后,再插入保护器相应端子上并将螺钉拧紧压实。
保护器内部带有交流电,严禁非专业人士擅自打开产品外壳。保护器在使用期间,若被保护线路发生短路或过载故障而被限流保护时,保护器仍处于带电状态,不允许随意碰触用电线路的金属部分。待检查线路,并排除故障后,长按保护器的复位按键约2秒钟,使保护器恢复正常运行时。
当保护器因超温而发生限流保护时,则可能是因为负载电流过大,环境温度过高或通风散热不良等原因导致,可通过加强通风等措施,等保护器温度降下来后,再长按复位键,使保护器复位,恢复正常运行。
四、结束语
通过分析市面上的充电桩在服务过程中存在的不足,并结合无人驾驶技术的发展背景,本课题设计了一款集成手动充电方式和自动充电方式的新式充电桩。该新式充电设备既兼容现有的电动车辆,同时又可以为无人驾驶车辆直接提供充电服务,在一定程度上降低了充电桩更新换代的成本,为充电基础设施的发展提供了新思路。
参考文献
[1]端木庆玲,阮界望,马钧.无人驾驶汽车的先进技术与发展[J].农业装备与车辆工程,2014,52(3):30-33.
[2]潘福全,亓荣杰,张璇,张丽霞.无人驾驶汽车研究综述与发展展望[J].科技创新与应用,2017,(2):27-28.
[3]孙扬,杨贺.无人驾驶车辆智能水平等级划分[J].科技导报,2017,35(17):80-83.
[4]AGUNBIADEOY,NGWIRASM,ZUVAT,etal.Improvinggrounddetectionforunmannedvehiclesystemsinenvironmentalnoisescenarios[J].InternationalJournalofAdvancedManufacturingTechnology,2016,84(9-12):2719-2727.
[5]NYJL,RIBEIROA,PAPPASGJ.AdaptiveCommunication-ConstrainedDeploymentofUnmannedVehicleSystems[J].IEEEJournalonSelectedAreasinCommunications,2012,30(5):923-934.
[6]朱莉,王禹淇,张轶鹏.时分割脉冲调宽技术在电动汽车充电设施仪表校验中的应用[J].自动化技术与应用,2014,33(3):66-68.
[7]王旭,齐向东.电动汽车智能充电桩的设计与研究[J].机电工程,2014,31(3):393-396.
[8]李良,郭艺.充电桩建设面临的突出问题及亟待落实的政策[J].中国能源,2016,38(1):37-39,36.
[9]王潼,李平.中国新能源汽车充电基础设施产业建设研究[J].汽车工业研究,2017,(1):4-9.
[10] 张晓军,谢辉迪,许剑锐,许招阳.基于STM32的智能充电桩嵌入式控制系统设计[J].电子测量技术,2017,40(2):144-148李慧.民用建筑地下车库充电桩配电设计解决方案
[11] 孙炜煊,陈毅,王帅,汪贵平.电动汽车无人充电桩设计与实现
[12] 安科瑞企业微电网设计与应用手册.2020.06版
作者简介: